Weeknotes #5
It’s been a slow week for projects: after an excess of software last week, I steered clear this week, focusing on some—as yet unpublished—posts for this site, and the spherical display.
Outside of the projects (a very blurry line at times) I enjoyed assembling my MiSTer. It’s been a great opportunity to rediscover some childhood systems and explore contemporary ‘retro’ games like Wonderful Dizzy1, released for the ZX Spectrum last year. I’m very much looking forward to finally getting to grips with the Amiga and Workbench (later AmigaOS), a beloved system that I missed out on during my childhood.

Remembering RISC OS on the Acorn Archimedes
I was also happy to (unexpectedly) receive my first dose of the Pfizer COVID vaccination on Saturday. It’s wonderful to see just how rapidly it’s being rolled out here in San Francisco.
Spherical Display
The electronics parts are now trickling in for the spherical display—it’s great to see things start to come together.

My desk, looking a little more cyber than usual
First up, my unbranded DotStar LEDs turned up from China and I was finally able to get a sense of how well they’ll work inside the hula hoop. Fortunately, the LED strip fits perfectly, and the translucent plastic diffuses the light well.
The 270 LEDs take more power than I expected: Adafruit suggests each pixel has a peak of 60 mA at full brightness white, so that’s a whole 10A at 5V (50W) for the complete ring. This means I currently have to run them at 10% brightness when using my 1A power supply; any higher, and the DotStars give up and show only red. Needless to say, I’ve ordered a new power supply.
While I didn’t spend much time on the software itself, I tweaked Adafruit’s example code just enough to get started setting different colours, and animating the individual pixels:
Running a variant of the Adafruit strandtest sample code
As I noted a couple of weeks ago, the gearing ratio was wrong in my original mechanical designs so, last week, I fired up Fusion 360 and took another pass at the problem.
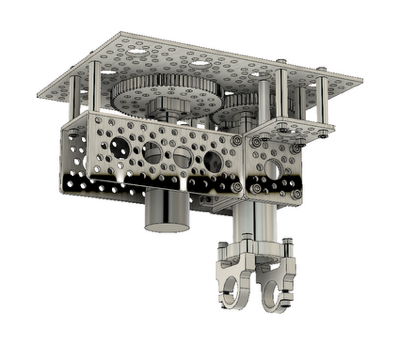
Mounting the new gears made everything significantly more complex
Figuring out how to accommodate the new gearing proved challenging, requiring me to take another go at mounting the motor. Fortunately, after much searching, I found a dedicated adapter that converts between the 17mm mounting on my motor, and the imperial dimensions of the Actobotics parts I’m using. Overall, it feels like it’s going to be a much more robust setup, so I’m happy to have had the chance to address this issue. I also needed to add a couple of adapters to connect the ½" hub-mount gear to the 1" tubing that serves as the axel for the hula hoop. This takes up far more vertical space than I’d like, so I might look to using ½" tubing in a future update.
Also shown in the rendering is a large horizontal plate: this is my first attempt at adding something to attach the electronics to, and to serve as a mount-point for a scaffold or lighting rig. I’m pretty sure this will require a number of iterations, but it should be good enough to allow me to secure it to the clothes rack I’ve bought for testing.
The FeatherWing connectors arrived yesterday, meaning I should be able to move my electronics off the breadboard, and try my hand at controlling the motor and LEDs together this coming week. If I’m really lucky, some of the new structural parts will turn up from ServoCity and I can get the hoop spinning.
Speaking with my friend Mike, I realise that even with my diagrams and descriptions, it’s not obvious how the display will work mechanically. I’ll try to put together an animation (or perhaps even a live video) next week to show better how the whole contraption is meant to work.
Website
Even in a slow week, there always seems to be something—however small—to do on the website. This week, I re-instated the Projects page and linked the various projects I’ve already managed to publish. There remain a couple of others to clean up before I’m able to release them, but I hope to add them soon.
Longer-term, I’d love to turn the page into more of a showcase, with hero shots and per-project pages that include the relevant posts I’ve written, links to GitHub, Thingiverse, … etc.
-
I confused myself when typing this up: it turns out there’s actually a number of modern Dizzy games including Wonderland Dizzy for the Nintendo Entertainment System that was released in 2016. ↩